ME218C
Spring 2008
The Duck
Overview:
Design Paradigm:
Keep it clean and pretty on the outside, strong and rugged on the inside, and by all means necessary make it WATER-PROOF!
We started with a desire to make a remote control rubber ducky. It’s cute, nostalgic, and belongs in the water. Once we found a giant toy duck online measuring the proper dimensions, we took the concept to reality by designing a boat around it. Because we wanted the duck to be fast and powerful, and capable of pumping some serious water, it was necessary to construct a life preserver-like boat for the duck to increase its buoyancy and stability.
The Craft:

The bulk of the craft was constructed out of pink FOAMULAR insulation from Owens Corning (extruded Polystyrene). The material is a rigid, closed cell foam with great water resistance and minimal weight.


The main hull was carved in an oval shape with a ramped front, and rear cutouts for the propellers, which enabled good flow over the blades. At the center of the hull we created a cavity to fit the 800 gph bilge pump, which extends below the bottom of the hull the sufficient amount to ensure priming. Each propeller is attached to a steel shaft that extends through a bronze housing at approximately a 30° angle. By mounting the props at this angle, we were able to simplify the design and contain the motors inside the main cavity of the duck, above water level.


To protect the hull from sharp walls and poorly controlled boats, it is surrounded by a soft, black foam bumper. This same material is also used to create a water-tight seal between the upper and lower halves of the duck, and around the water tubing as it exits the hull. This ingenious design is far superior to Tupperware and eliminates the need for tape or unsightly seams.
Hardware:

The duck cavity is a water-tight vessel for all the ship’s electronics. On either side sit a pair of un-geared Maxon® motors that have been shrouded by grounded foil to reduce noise. Each motor is connected to the drive shaft through a spider coupling. Next to the right motor sit both motor drive boards (powered by TLE 5206’s). Next to the right motor sits the main power board, which regulates the 5V needed to run all of the logic, power the xBee radio, motor signals and LEDs.

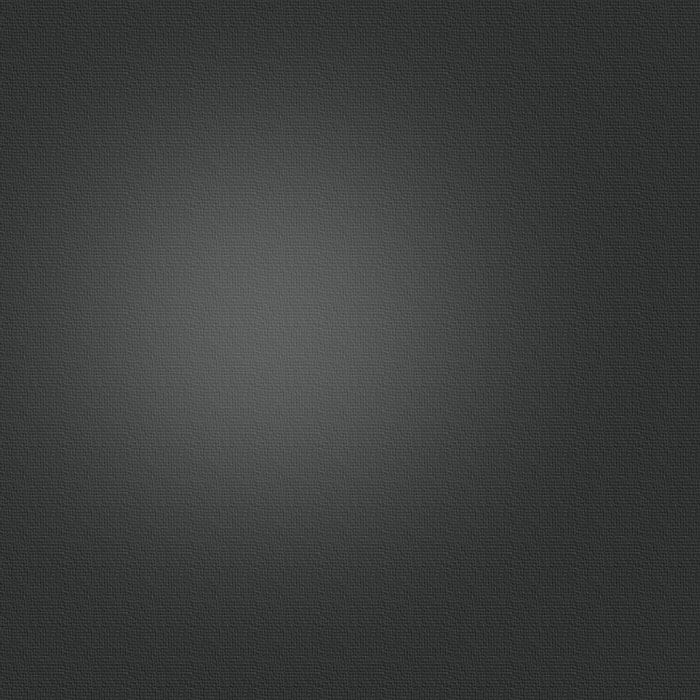
At the rear of the craft cavity, we stack the batteries: a total of 16 AA batteries were used to power the duck. 4 batteries were reserved for the xBee (with a shared ground to the remaining batteries) in order to isolate noise from the motors. Of the 12 other batteries, 8 were stacked in series and sent to the 5V regulator, as well as directly to the motor boards. These batteries were connected to a 30A switch to allow complete disabling of the motors. The final 4 batteries were stacked in series and sent to the bilge pump, which could be turned on/off using a power IRLZ 34N N-Channel MOSFET.


All the duck intelligence was contained, of course, in the head! To reduce space and just make things cooler, both microprocessors were fitted onto the xBee board, which was placed in a restraining collar in the head (far away from the noisy motors). The xBee board uses power from its reserved 4 AA batteries and an internal regulator to 3.3V. Signal wires run from this board to the above-mentioned power board, where the 3.3V signals are changed to 5V through a series NPN transistor (2N 3904) and N-channel MOSFET (2N7000).


At the top of the head lie the iButton reader and team affiliation LEDs. The iButton reader for the duck is identical to that used in the guitar. The large blue and red LEDs are used to describe the team affiliation and indicated a proper pairing between the helm and craft. Once team affiliation has been established, a latex balloon is placed over the duck’s head matching the team color, in order to protect the duck from water leaking through the iButton.
Driving:

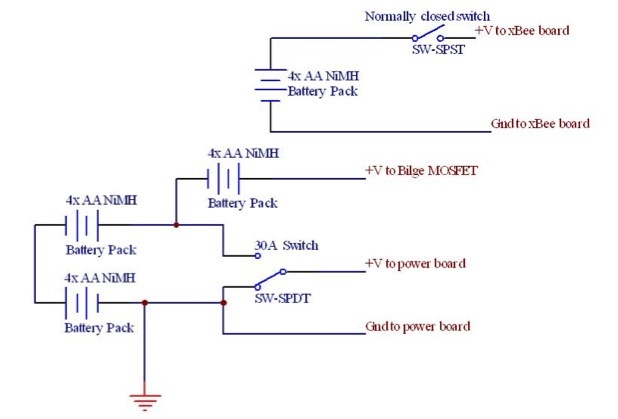
Each Maxon® motor runs at approximately 1.5 A at full power (8V). We drew up the motor curves in Excel, and this current gives us about 10mNm of torque. This places us nicely between our max power and max efficiency points -- a fortunate combination of motor and prop.
Variable speed is achieved through pulse width modulation at 600 Hz and duty cycles ranging from 12-88%. Both motors can be reversed by raising the non-modulated input line to the motor board high and reversing the logic on the modulation (positive to negative duty).


We used a pair of model motor boat propellers with a steep pitch for high torque (think barge-like). The right and left propellers are intended to rotate in opposite directions for forward thrust, which improves stability. Hence, both medial blades rotate downward.
The logic for controlling the driving of the boat is designed for maximum low-speed maneuverability. Therefore, according to the communications protocol [insert link], the duck is able to perform an in-place turn with a zero-velocity command. To achieve this, direction (turning) commands from the helm set the speed and direction of the motor on the side of the turn, whereas speed commands set the prop speed on the opposite side. For example, a 11011011 navigation command (strong right turn, slow forward speed) will be interpreted to set the right motor in reverse (60% duty) and left motor forward (36% duty).
Water:
The point of the Floatilla game is to fill up your opponent’s goal faster than they can fill up yours. We approached this topic from several fronts.
Offense:

In order to have the potential of winning a game during a 5 minute ordeal with changing bases, we decided to go for raw power. At 800 gph, our bilge pump can fill the 5 gallon jug in well under a minute. To get the most out of this feature, we decided against reducing flow through a nozzle (reducing flow rate and requiring more aim) and opted instead for the faucet style delivery. After several iterations with a long hose, we cut it short and forced the flow downward.

Here Kent is filling the base during a practice session.
Defense:

Our defensive strategy is a good example of wasted ingenuity. We came up with an amazingly simple way to siphon water out of our own base by dipping the end of the hose into the water and doing a quick burst of flow, then turning the bilge off to allow the goal to drain. Unfortunately, no other team was capable of filling up the bucket to a high enough level for this strategy to be useful, so we removed the feature and poured our efforts into better aiming.


On the other hand, through the design of the siphon method, we also implemented a simple blocking strategy, whereby the duck can cover the entire bucket and prevent the opponent from spraying water in.
Brain:
At the center of all this hardware is our massive state machine in assembly language. Thanks to an amazing job of commenting and writing pseudo code, there’s no need for us to explain anything. Read it for yourself! Go to the downloads page to check it out.
The craft
a Duckies Tail.
Kent detailing the Racing Flames.
Will’s dream, our opponent’s nightmare...